Particle Filter Implementation
a C++ Implementation of a localization algorithm with graphics rendered in OpenFrameworks
Introduction
In robotics, answering the question “Where am I?” in a known environment is tricky. Fortunately, a number of techniques have been developed to answer this question, and the particle filter is one of these techniques.
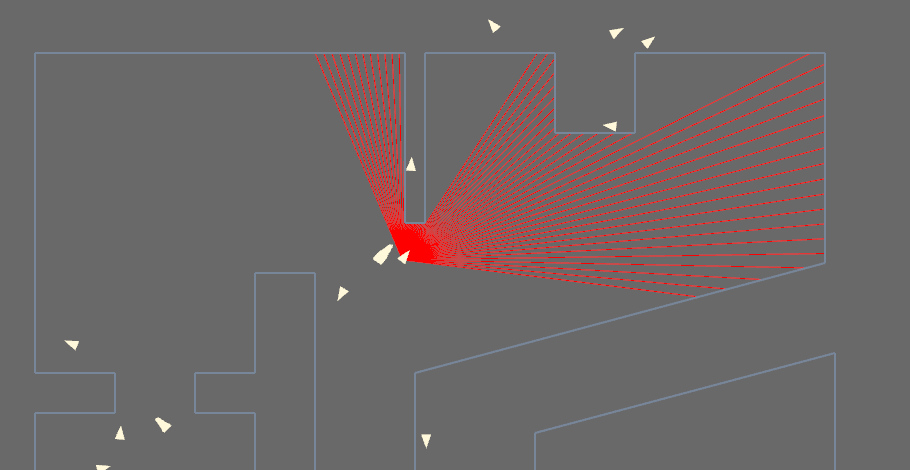
Below is a quick video of my implementaton. When I started to wrap my head around this algorithm, I realized that there aren’t many bare-bones implementations out there that expose the guts of what the particle filter is actually doing, so I wrote one to get a better understanding of how they work. This is the second time I code one up, so I’ve done my best to keep this version clean to best expose what’s going on in case I need to build off of it later.
This was also my first foray into using OpenFrameworks, a C++ frameworks, for visualization. I neglected to use ROS to keep the code as clean and straightforward as possible, requiring as little external downloads as possible to get it up and running on another machine. Here, OpenFrameworks is just visualizing the data.
One last note: at the time of video capture, I didn’t evenly distribute the particles throughout the map. (I’ve changed that in the latest version.)
Feel free to download the source code on Github
In the context of navigation on a 2D map, a particle filter can estimate the robot’s most likely pose (position and orientation) in that map. Within the map, the robot’s distribution of all possible poses is messy and very difficult to model mathematically with an equation. Rather than trying to model this distribution of poses mathematically, however, a particle filter, instead, attempts to capture this distribution by sampling the it many many times. The more times we sample this distribution, the better picture we can capture of the robot’s possible distribution of poses over the map and, ultimately, the better chance we have at estimating the robot’s true pose in the map.
In a nutshell, the particle filter tries numerous possible poses on the map, each pose estimating how likely it is to be the particle’s true pose. As the particle filter tries more poses, some are more likely than others, and the more likely poses are kept, while the less-likely poses are thrown out. Eventually, as the robot contiues to sample the environment with its sensors, only the most likely poses are kept, and they generally converge on poses that are very likely for the actual robot.
Unfortunately, there’s a catch. That is, the particle filter is nondeterministic. Because we can’t possibly span the distribution with only a handful of possibilities, we don’t know for sure if the estimate returned by the particle filter is the true pose of the robot. Regardless, with some tuning and sufficient computational resources, the particle filter can converge fairly often.
References
- The Probabilistic Robotics Text
- Prof Clark’s Lecture Notes from HMC’s Autonomous Robot Navigation Class