Research
Publications and Development for Hardware, Software, and Undergraduate Courses
2022
The exa-SPIM
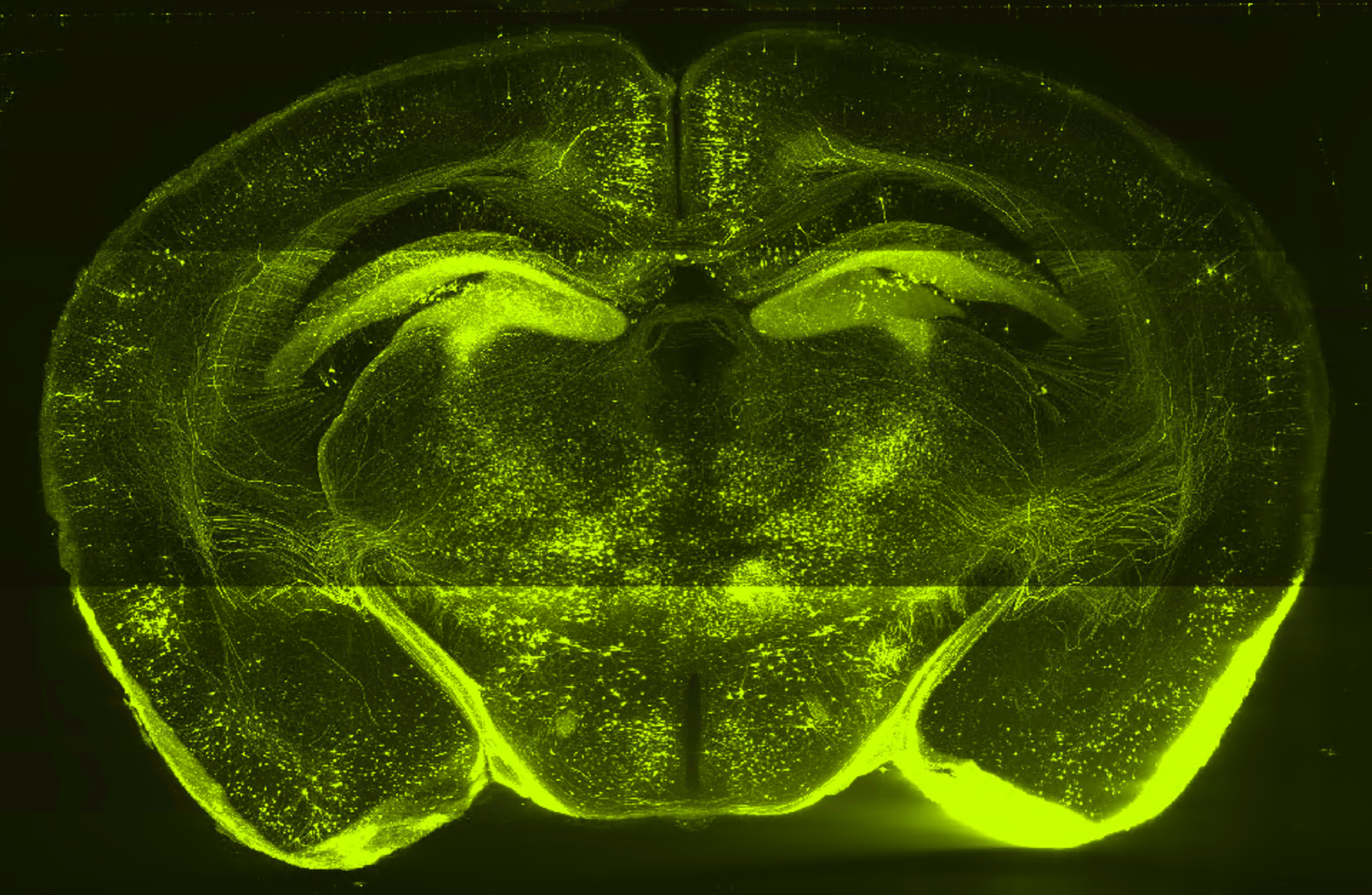 Expansion-assisted selective plane illumination microscopy for nanoscale imaging of centimeter-scale tissues
Expansion-assisted selective plane illumination microscopy for nanoscale imaging of centimeter-scale tissues
Adam Glaser, Jayaram Chandrashekar, Joshua Vasquez, Cameron Arshadi, Naveen Ouellette, Xiaoyun Jiang, Judith Baka, Gabor Kovacs, Micah Woodard, Sharmishtaa Seshamani, Kevin Cao, Nathan Clack, Andrew Recknagel, Anna Grim, Pooja Balaram, Emily Turschak, Alan Liddell, John Rohde, Ayana Hellevik, Kevin Takasaki, Lindsey Erion Barner, Molly Logsdon, Chris Chronopoulos, Saskia de Vries, Jonathan Ting, Steve Perlmutter, Brian Kalmbach, Nikolai Dembrow, R. Clay Reid, David Feng, Karel Svoboda, BioRxiv
I co-wrote the acquisition software that drives the hardware of this microscope!
2020
Jubilee
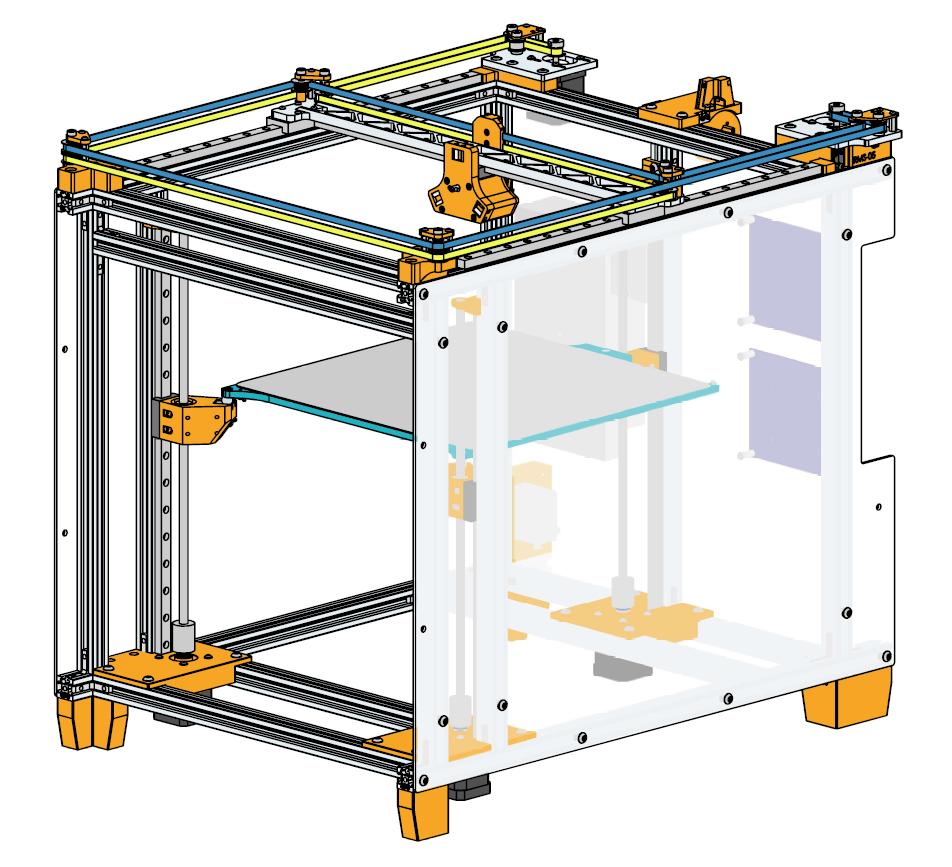 Jubilee: an extensible machine for multi-tool fabrication
Jubilee: an extensible machine for multi-tool fabrication
CHI 2020
I designed an open source platform for experimenting with ad-hoc multi-tool cnc machine workflows.
2014
Raspberry Pi Peripherals Library
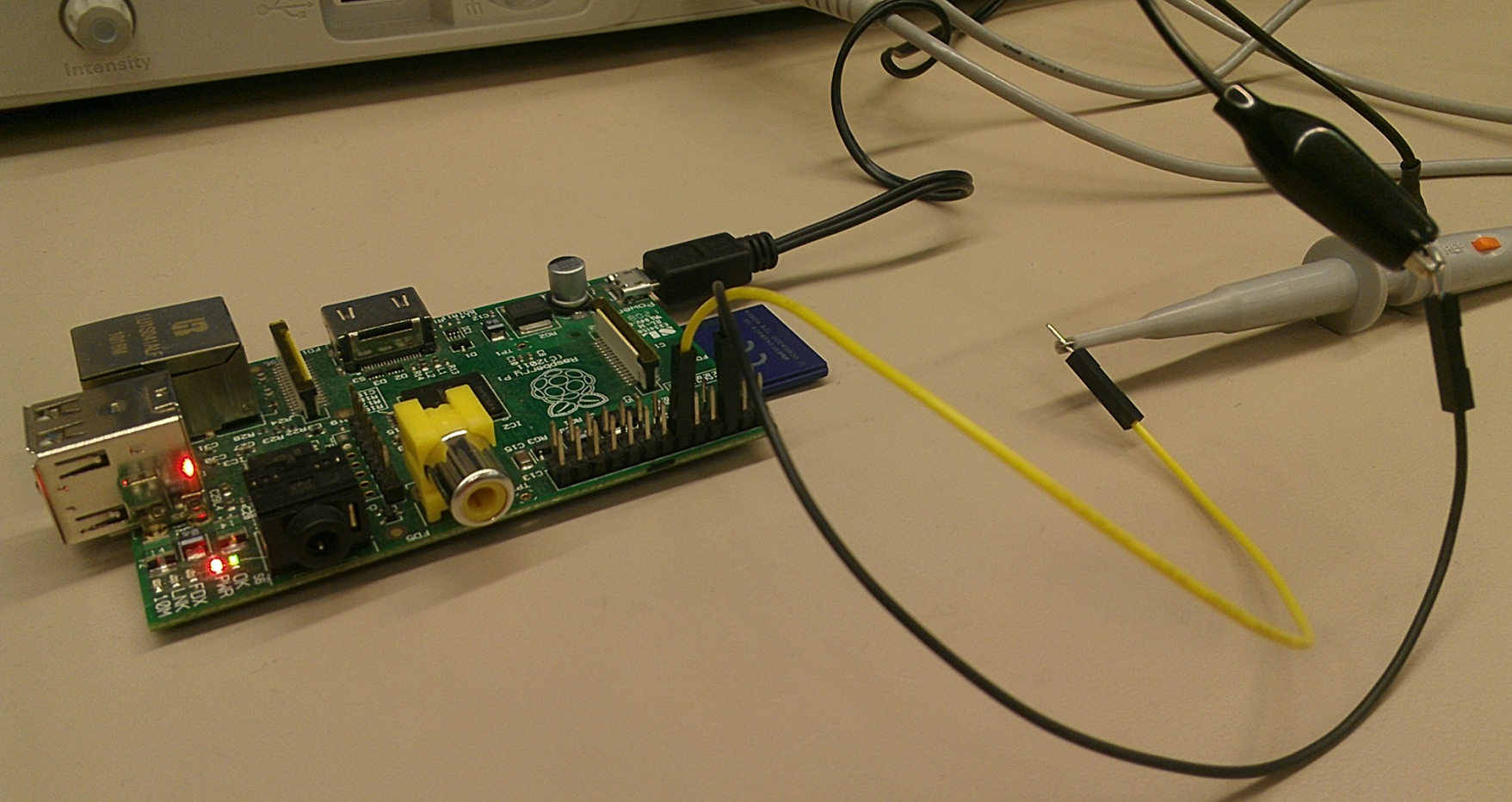 I co-developed a minimalistic Raspberry Pi Peripherals library with Sarah Lichtman.
This library provides a memory-mapped alternative to the traditional Wiring
library, enabling PIC-like programming with direct access to bitfields.
This library serves as the back bone behind a number of textbook examples in the
third edition of Digital Design and Computer Architecture
by Harris and Harris.
I co-developed a minimalistic Raspberry Pi Peripherals library with Sarah Lichtman.
This library provides a memory-mapped alternative to the traditional Wiring
library, enabling PIC-like programming with direct access to bitfields.
This library serves as the back bone behind a number of textbook examples in the
third edition of Digital Design and Computer Architecture
by Harris and Harris.
2013
Underwater Field Robotics: The Malta Cistern Mapping Project
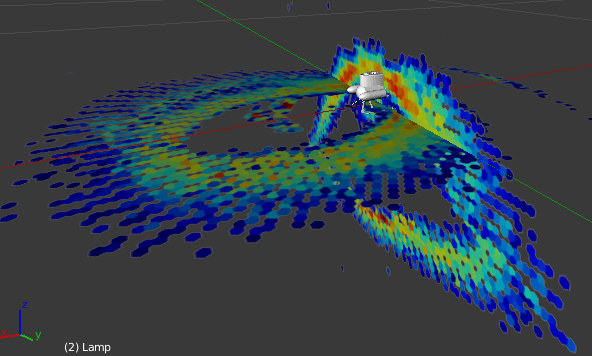 Towards Three-Dimensional Underwater Mapping Without Odometry
Towards Three-Dimensional Underwater Mapping Without Odometry
Dobke, A., Vasquez, J., Lieu, L., Chasnov, B., Clark, C., Dunn, I., Wood, Z. PDF Received by the Unmanned Untethered Submersible Technology Conference (UUST 2013).
This paper details the LatticeMap Algorithm, an algorithm developed for fitting sequential ROV sonar scans using a iterative least-squares fitting technique. Scans were taken from ancient Cisterns in Malta during the Spring of 2013. The International Computer Engineering Experience (ICEX) Program is a multi-disciplinary, multi-year project focused on the three-dimensional mapping of submerged archaeological sites. Within this program, students build upon sensor-based map-making techniques, such as particle filtering and SLAM, to construct 3D maps of underwater cisterns. The task itself combines both field robot deployments and data analysis. Ths past summer, the ICEX team collected scans from numerous cisterns in Malta to construct maps using a new scan-matching algorithm.
Underwater Field Robotics: ROV hardware additions through the CAN Bus interface
 Following the most recent data-collection deployment in Malta in the Spring
of 2013, I have been developing a rotating mount for performing underwater sonar
scans at various angles. This mount is an independent embedded system attached to
the robot underwater and driven by a software link over the ROV's CAN Bus interface.
Following the most recent data-collection deployment in Malta in the Spring
of 2013, I have been developing a rotating mount for performing underwater sonar
scans at various angles. This mount is an independent embedded system attached to
the robot underwater and driven by a software link over the ROV's CAN Bus interface.
The Combat Robotics Experimental Learning Project
Beginning in fall 2012 and concluding the following spring, the HMC combat robotics club designed and fabricated a competitve combat robot with the final goal of participating in Robogames, 2013 in San Mateo, California. From this experience, our team designed and built Robespierre, a 220 [lb]. combat robot featuring novel competitive techniques. Robespierre features several hundred components, most of which were machined by a handful of students over three months during the spring semester. Chiefly, Robespierre's fabrication represents one of the student body's proudest achievements as an entirely student-driven design project. Through a combination of research, design, fabrication, testing, and management, we have augmented motivation for pursuing a deep understanding of the process in what most of us consider to be a "side-project" apart from our school work.A brief video demoing a spinner weapon field test
2012
Open Source MEMs Sensor Driver Development under a ROS Framework
Developed at the Bosch Research and Technology Center
 MEMs sensors offer the robotics community the benefit of their small form-factor
and fairly high-precision measurements for state-estimation algorithms.
Nevertheless, the protocols necessary to retrieve the data are often
chip-specific, necessitating a software driver to communicate in the correct
manner. Furthermore, these MEMs sensors cannot be directly connected to the
computer operating the robot. Rather, they must first be connected to an
embedded development board that serves as the hardware interface between raw
sensor and computer. However, software drivers must also be written to interface
with these boards as well.
To simplify the hassle of retreiving data from these sensors and bringing it
cleanly into a high-level algorithm, I developed a software framework that
formed a hardware abstraction layer for these sensors under Robot Operating
System (ROS). Thus, a roboticist could simply setup the physical cables to the
chip, enter the hardware configuration as parameters, and retrieve fresh
sensor data from the chips without needing to understand the
specific protocol details needed to extract the data from these chips.
The current set of C++ drivers supports two development boards, an Arduino Uno
and a Sub-20, as well as three of Bosch's MEMs sensors:
the
BMP085 pressure sensor, the
BMA180 accelerometer, and the
BMC050 accelerometer/magnetometer.
Maximum throughput of sensor data is limited by the latency of the computer's USB connection and currently tested at speeds up to 500 [Hz].
The entire software package can be downloaded from the bosch-ros-pkg and is currently maintained
by my project advisor, Philip Roan.
MEMs sensors offer the robotics community the benefit of their small form-factor
and fairly high-precision measurements for state-estimation algorithms.
Nevertheless, the protocols necessary to retrieve the data are often
chip-specific, necessitating a software driver to communicate in the correct
manner. Furthermore, these MEMs sensors cannot be directly connected to the
computer operating the robot. Rather, they must first be connected to an
embedded development board that serves as the hardware interface between raw
sensor and computer. However, software drivers must also be written to interface
with these boards as well.
To simplify the hassle of retreiving data from these sensors and bringing it
cleanly into a high-level algorithm, I developed a software framework that
formed a hardware abstraction layer for these sensors under Robot Operating
System (ROS). Thus, a roboticist could simply setup the physical cables to the
chip, enter the hardware configuration as parameters, and retrieve fresh
sensor data from the chips without needing to understand the
specific protocol details needed to extract the data from these chips.
The current set of C++ drivers supports two development boards, an Arduino Uno
and a Sub-20, as well as three of Bosch's MEMs sensors:
the
BMP085 pressure sensor, the
BMA180 accelerometer, and the
BMC050 accelerometer/magnetometer.
Maximum throughput of sensor data is limited by the latency of the computer's USB connection and currently tested at speeds up to 500 [Hz].
The entire software package can be downloaded from the bosch-ros-pkg and is currently maintained
by my project advisor, Philip Roan.
2011
Development of the framework for the Robotics Choice Lab Course
The Robotics Choice Lab course at Harvey Mudd College began in the Spring of 2012. During the prior summer, I co-developed the hardware platform and setup the first implementation of the Robot drivers in ROS. Furthermore, I developed the layout for the initial layout for the first few Lab assignments listed on the class homepage. In the following spring, I was given the chance to actually take this class. For the team final project, Jake Low and I developed a control system for the Parrot AR Drone using the angular displacements of a flat board as seen by a Kinect Depth Sensor. The final results of this project are documented in the video below and a brief writeup about the preliminary development is documented hereRedesign of the Autonomous Vehicles Course
 E11: Autonomous Vehicles, is a freshmen introductory course to circuits, programming, and controls.
The course features a broad introduction to software tools, such as Solidworks; embedded programming tools, such as the Arduino; and machine shop experience.
Students build a robot base from a starter kit and develop software to interpret binary sequences, known as gold codes, emitted from IR emitting beacons.
Following this stage, they then develop algorithms to compete in an autonomous game of capture-the-flag by programming their robots to read specific gold codes and respond by tagging beacons for points.
Following the course's first run in Fall 2010, I joined a team of students under Professor Harris to redesign the course for the following year.
Within this semester, we produced several revisions to streamline the course in its coming years.
Namely, we redeveloped the robot starter kit, produced a second revision of the robot's printed circuit board to eliminate hardware bugs discovered in the first year, and redesigned the lab exercises to promote a better understanding of the material.
Since this relaunching of the course, I have served as a member of the student teaching team for the three following years.
Within this time, I have served as head tutor for two years and currently act as a lab proctor.
I have written the example solutions to the programming assignments written in Arduino, and I have also independently revised the robot pcb for the course's fourth year, further reducing the number of design errors.
E11: Autonomous Vehicles, is a freshmen introductory course to circuits, programming, and controls.
The course features a broad introduction to software tools, such as Solidworks; embedded programming tools, such as the Arduino; and machine shop experience.
Students build a robot base from a starter kit and develop software to interpret binary sequences, known as gold codes, emitted from IR emitting beacons.
Following this stage, they then develop algorithms to compete in an autonomous game of capture-the-flag by programming their robots to read specific gold codes and respond by tagging beacons for points.
Following the course's first run in Fall 2010, I joined a team of students under Professor Harris to redesign the course for the following year.
Within this semester, we produced several revisions to streamline the course in its coming years.
Namely, we redeveloped the robot starter kit, produced a second revision of the robot's printed circuit board to eliminate hardware bugs discovered in the first year, and redesigned the lab exercises to promote a better understanding of the material.
Since this relaunching of the course, I have served as a member of the student teaching team for the three following years.
Within this time, I have served as head tutor for two years and currently act as a lab proctor.
I have written the example solutions to the programming assignments written in Arduino, and I have also independently revised the robot pcb for the course's fourth year, further reducing the number of design errors.